Этот робот имеет размеры, сопоставимые с размером нормальной пчелы и он настолько мал, что нет никакой возможности снабдить его собственным источником энергии и вычислительным устройством для того, чтобы отправить его в самостоятельный полет.
Поэтому исследователи задались вопросом, какие минимальные размеры должен иметь летающий робот для того, чтобы обладать возможностью полностью автономного полета. И в результате всего этого на свет появился новый FWMAV-аппарат (Flapping-Wing Micro-Air Vehicle), который достаточно мал для того, чтобы называться "микро", и достаточно велик для того, чтобы иметь возможность летать полностью самостоятельно.
Исследователи продемонстрировали, что для того, чтобы сохранять стабильность полета, роботу требуется размахивать крыльями 70-80 процентов времени. Однако крылья и прочие элементы конструкции робота столь малы и хрупки, что после 40 испытательных полетов робот начал часто ломаться и стал терять эффективность полета.
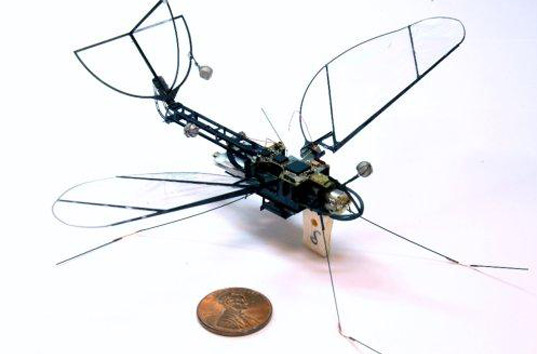
Размах крыльев FWMAV-робота составляет 16 сантиметров, а его вес равен всего трем граммам, половина из которых приходится на двигатель. Как упоминалось немного выше, он имеет источник энергии, электронную систему управления и коммуникаций.
По своим размерам и стилю полета робот FWMAV больше всего походит на табачную моль (tobacco hawkmoth). Размахивая крыльями с частотой 25 Гц (раз в секунду) робот создает подъемную силу в 4 грамма, которой достаточно для того, чтобы он удерживался в воздухе и летать со скоростью около 5 метров в секунду.
Колебательные движения крыльев вырабатываются пружинной передачей, изготовленной из углеродистого волокна, которая преобразовывает вращательное движение двигателя в поступательное движение. Крылья движутся в диапазоне 90 угловых градусов и могут изменять угол наклона для улучшения аэродинамики полета точно так, как это делают крылья реального насекомого.
Самое большое отклонение от того, что создала природа, заключается в хвостовой части робота, которая очень похожа на хвостовое оперение самолета. Эта часть необходима роботу для того, чтобы обеспечивать стабильность робота, не позволяя ему отклоняться от курса и вращаться вокруг оси во время полета.
Реальное насекомое делает все это путем независимого контроля движений каждого крыла, но у робота нет такой возможности, поэтому ему необходимы дополнительные элементы конструкции.
По материалам:
gogetnews.info